



















En noviembre de 1664, La Lune, el buque insignia de la armada del rey francés Luis XIV, se hundió a 30 kilómetros de Toulon, en el sureste de Francia. 352 años después, OceanOne, un humanoide robótico creado en la Universidad de Stanford, ha buceado entre los tesoros y objetos del navío.
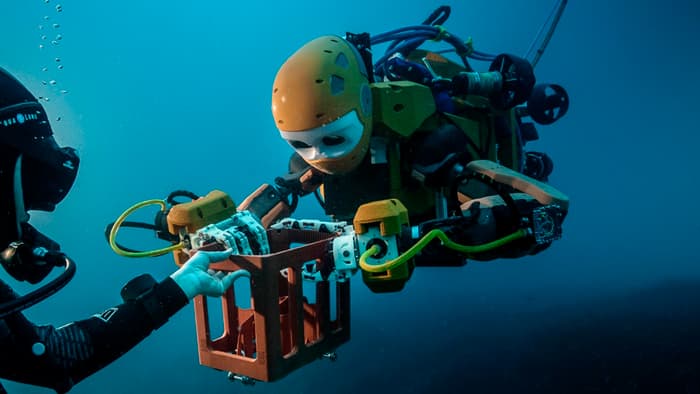
El androide, pilotado desde un barco en la superficie por Oussama Khatib, profesor de computación en Stanford, cogió un jarrón, sintió sus contornos, sopesó su tamaño e introdujo un dedo por su boca para agarrarlo mejor. Buceó hacia una cesta, lo depositó allí y cerró la tapa del contenedor antes de volver a la superficie, donde Khatib y una docena de arqueólogos e ingenieros esperaban ansiosos.
La expedición al lugar del hundimiento de La Lune ha sido la primera misión de este robot buceador con visión humana, un cerebro electrónico que aprovecha los últimos avances en Inteligencia Artificial y un sistema háptico de control: los sensores integrados en sus manos envían información a los joysticks con lo que se controla al robot, de forma que su piloto siente lo mismo que la máquina; por ejemplo, si agarra algo pesado y sólido, o ligero y frágil. Y ese es solo el primer paso, porque en un breve habrá sensores en cada uno de sus dedos.
El cerebro del robot procesa esa información y se las apaña para administrar su fuerza. Es capaz de asir con firmeza un objeto delicado, sin espachurrarlo. Esta habilidad convierte a OceanOne en un aliado perfecto para recuperar piezas de naufragios, manipular seres vivos como el coral o depositar sensores en lugares difícilmente accesibles de los fondos marinos.
Según el profesor Khatib, OceanOne “será como un avatar. La intención es usarlo para bucear de forma virtual y sin riesgos. Puedes sentir con precisión lo que está haciendo el robot y sentirte casi como si estuvieras allí; sus sensores táctiles crean una nueva dimensión de la percepción”.
La cabeza de este Cousteau artificial integra cámaras de visión estereoscópica (como la del ser humano) que le muestran al piloto exactamente lo que el robot ve. También cuenta con dos brazos articulados, y en la parte trasera lleva baterías, ordenadores y ocho propulsores multidireccionales. Pero son sus manos las que lo distinguen y lo convierten en una máquina tan especial.
Cada una de sus muñecas, completamente articuladas, está equipada con sensores de fuerza que transmiten información háptica a los controles del piloto. Es decir, que este siente en sus manos cómo es lo que sujeta el robot.
Una máquina independiente
El piloto está al mando siempre que lo desea, pero OceanOne se las arregla bien solo. Los sensores que cubren su cuerpo captan las corrientes y turbulencias, y activan automáticamente los propulsores para que el robot permanezca donde debe. Cuando se desplaza, unos motores van ajustando el movimiento de los brazos para que las manos estén equilibradas mientras trabajan.
La navegación se basa en la percepción del entorno mediante sensores y cámaras, cuyos datos se procesan con algoritmos que evitan que el androide choque con algo. Su sofisticación es tal que si detecta que sus propulsores no frenan lo suficiente, se protege del impacto inminente con los brazos.
OceanOne, creado en la Universidad de Stanford con la ayuda de la empresa privadaMeka Robotics y la Universidad de Ciencia y Tecnología Rey Abdalá (Arabia Saudí), ha nacido para sustituir al ser humano en tareas submarinas peligrosas (minería, mantenimiento de oleoductos, rescates…) o que desafíen nuestra capacidad física. Aún en proceso de mejora, puede ser también de gran ayuda en la investigación científica y la arqueología.
Como dice Khatib, “creamos una conexión intuitiva entre humano y robot. La persona aporta intuición, experiencia y habilidades cognitivas; y el androide llega donde la persona no puede, la lleva a lugares demasiado peligrosos para ella. Es una sinergia asombrosa”.
MUYINTERESANTE.ES









")

{kind=link}